Rovers Progress Update
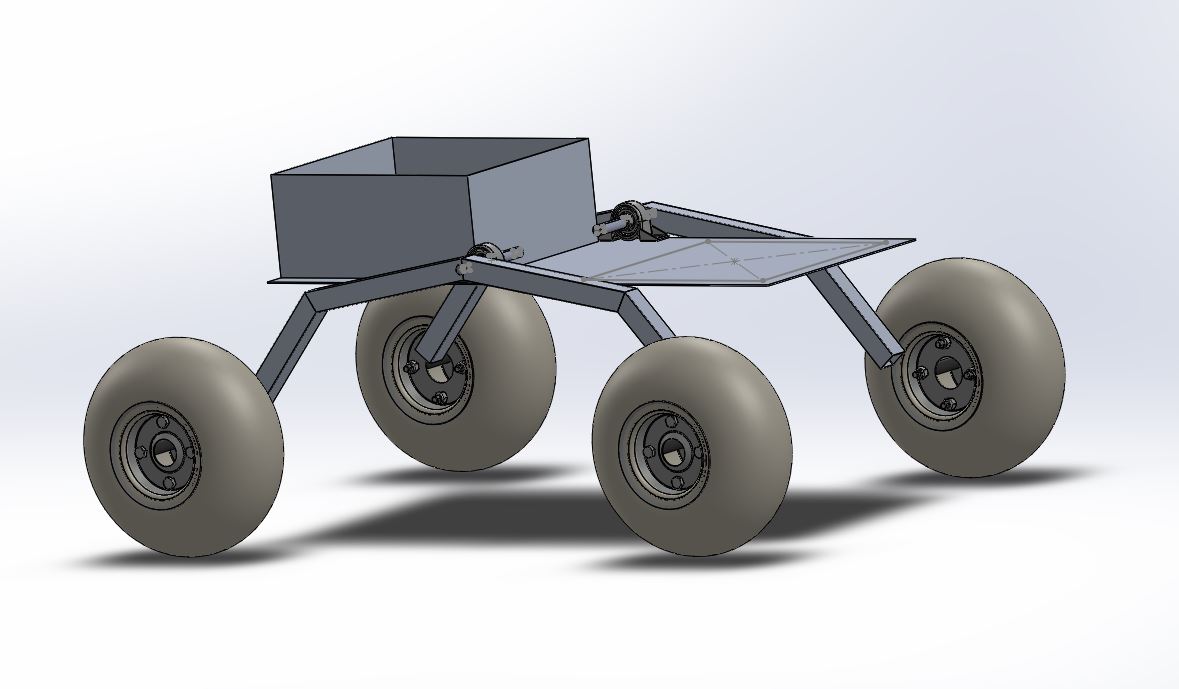
The Rovers team has been hard at work this year build our URC ready rover! The team has completed work on the rover chassis and suspension system.
The RIT SPEX rovers team has been hard at work building a next generation rover for entry for the university rover challenge and is excited to report on their progress. The University Rover Challenge (URC) is the world's premier rover competition for college students. Held annually in the desert of southern Utah in the United States, URC challenges student teams to design and build the next generation of Mars rovers that will one day work alongside astronauts exploring the Red Planet. SPEX is building a rover to compete in 2021.
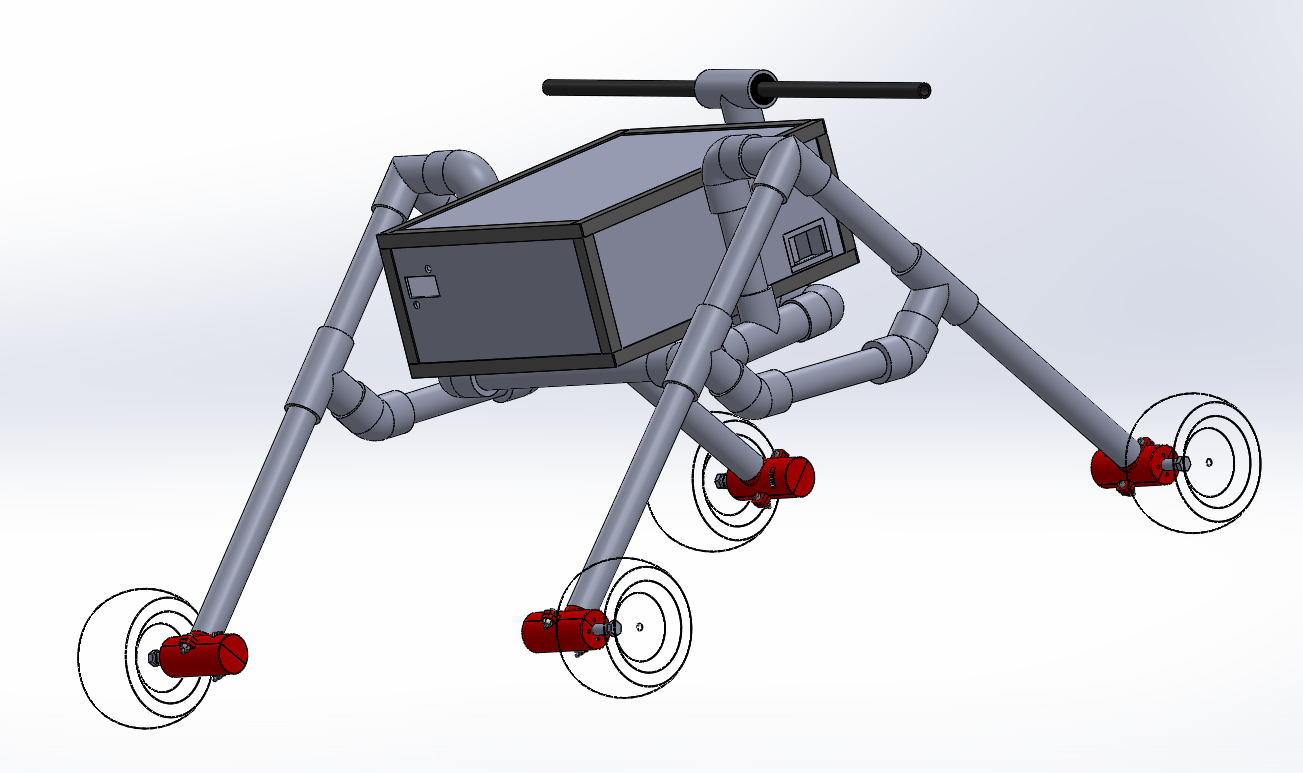
The mechanical team has put a lot of work into upgrading mini rover. The team has changed the suspension and are adding a differential bar as a learning exercise to practice for the URC bot. The team has also started work on the CAD model and has been working with the wheels of the bot.
The electrical team has begun work on building the power delivery system for the rover. This includes the charge controller, fuses, power rails and more. It is an evolution of the system that was built for mini-rover that improves in scale and capability. The team has also fit mini-rover with several upgrades so the software team can test out some of the new features and parts that we will be using on the new rover.
The software team has been hard at work. The team has built a mock-up of the base station as well as built models in OpenCV for object detection. The team has also integrated a 360° LiDAR scanner with our systems on the mini-rover. Using the LiDAR Scanner and video data, the team has begun to work on higher level autonomy for the rover. The development of these features are critical to the teams success in the autonomous parts of the university rover challenge.
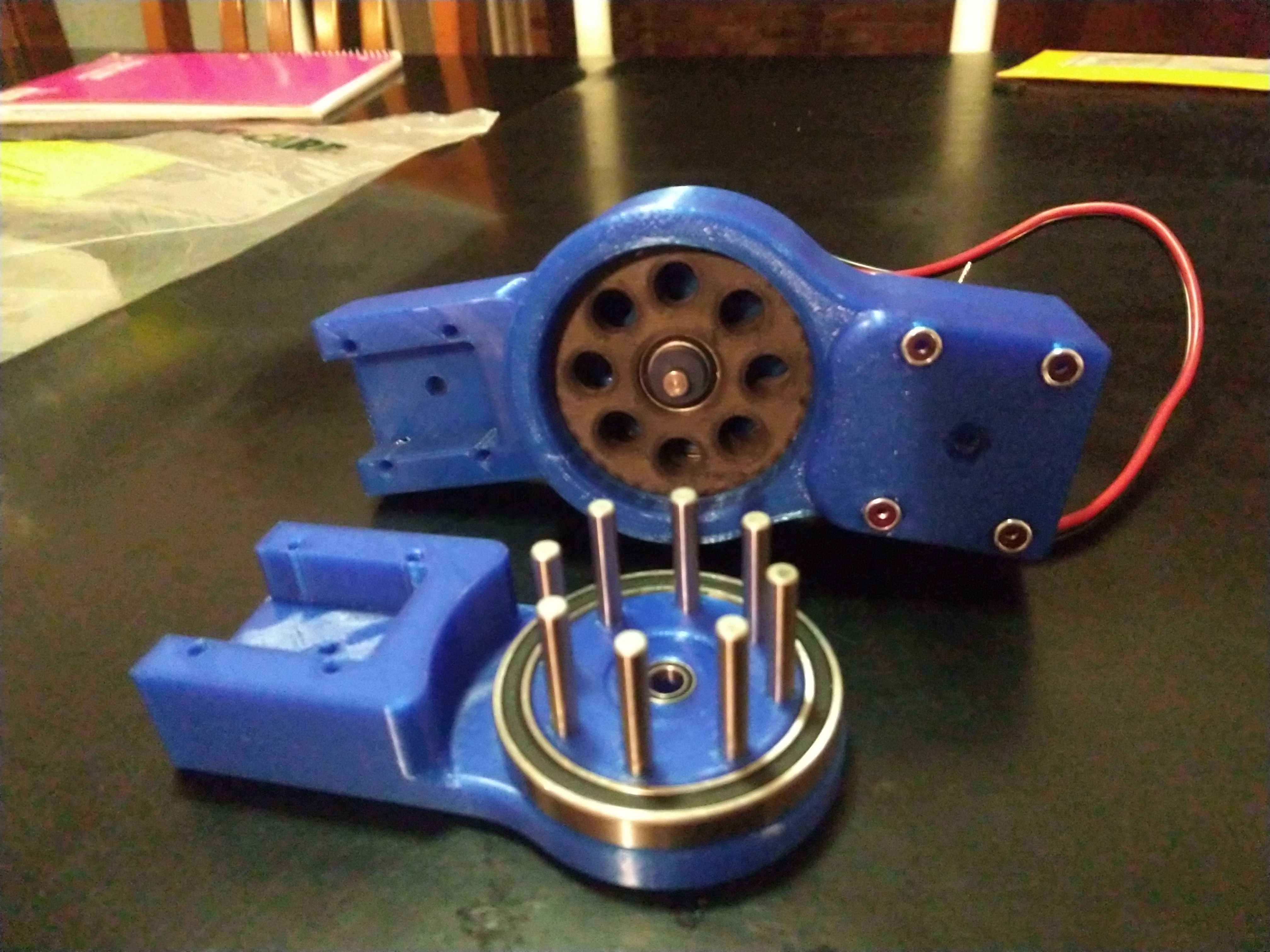
In order to ensure quality competition performance, RIT SPEX has partnered with RIT Robotics Club (MDRC). The teams have split the work with SPEX handling the rover chassis + related items and MDRC building the manipulator arm. MDRC has made fantastic progress with the arm so far. The team has used iterations of 3D-printed prototypes to improve their design.
The long-tem vision of this project is to open RIT Space Exploration up to a new area of projects. Robotics and rovers are at the core of deep space exploration and most science missions. The competition features very competitive and expensive rovers. These rovers feature autonomous navigation, fine control robotics, a scientific drill and more. It is a worthy long term goal.